
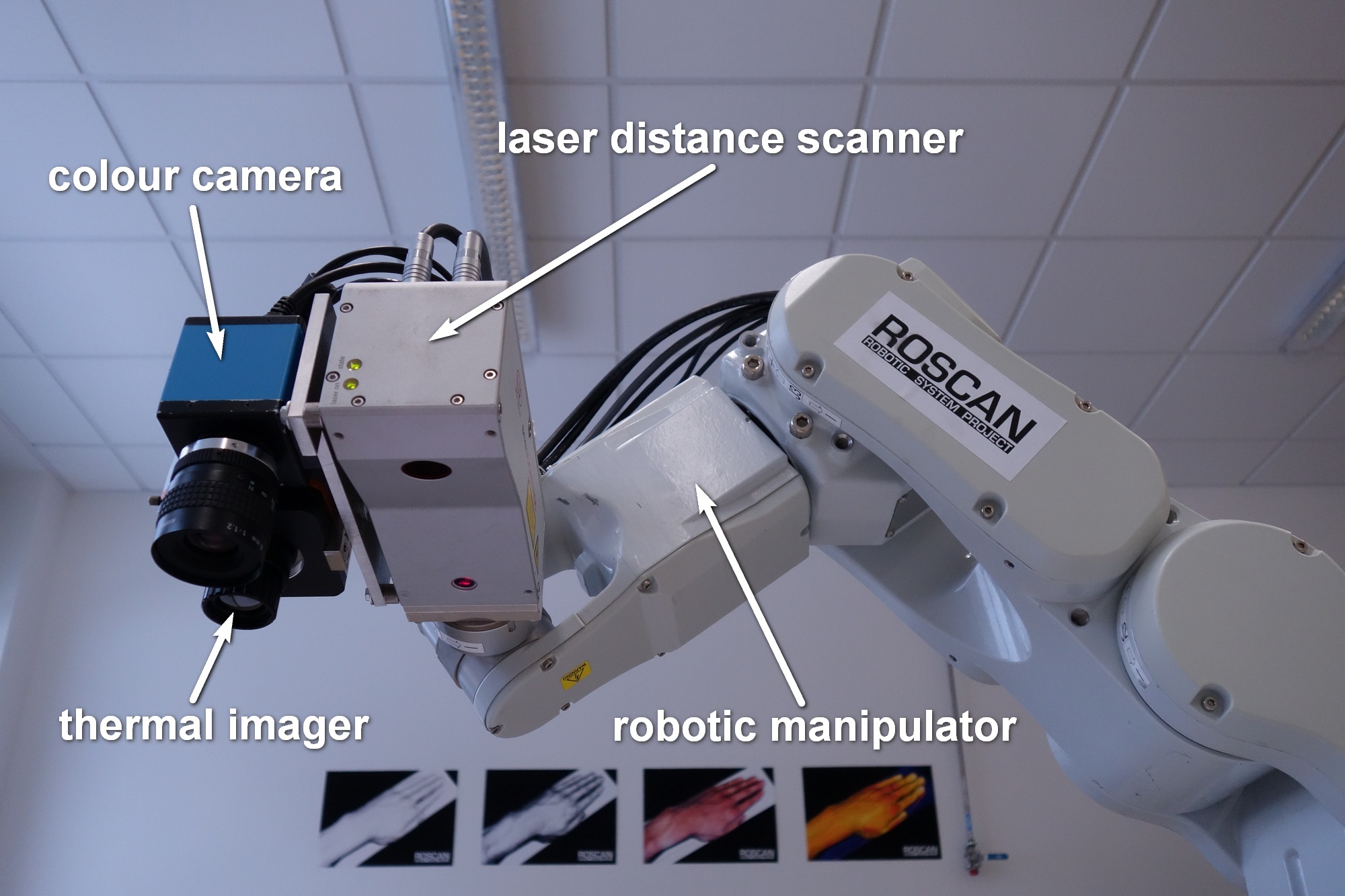
Zařízení RoScan tvoří robotický manipulátor, laserový řádkový dálkoměr, barevná kamera a termovizní kamera. Všechny komponenty jsou připojeny k počítači, který ovládá manipulátor a získává snímky ze snímačů.
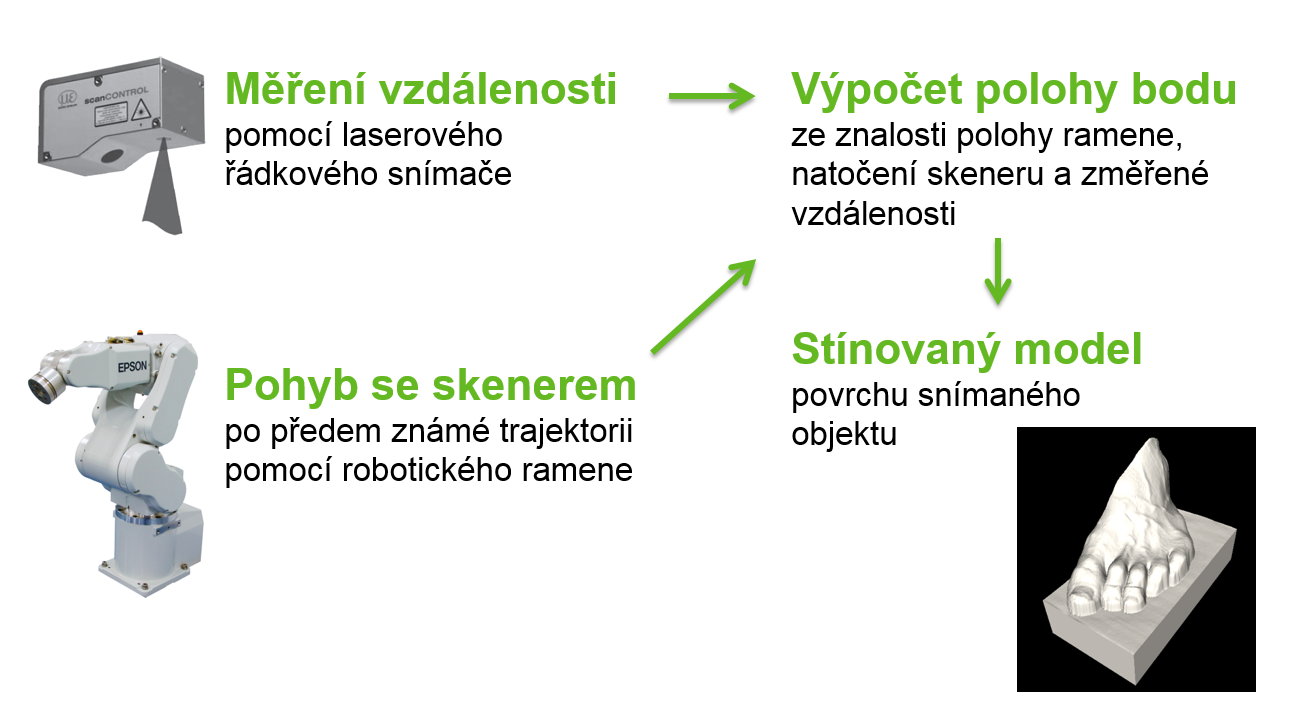
Nejprve pomocí robotického manipulátoru pohybujeme laserovým dálkoměrem kolem pacienta. Protože v každou chvíli víme, kde se snímač nachází, kterým směrem se dívá a v jaké vzdálenosti jeho paprsek narazil na skenovaný objekt, můžeme jednoznačně určit polohu každého bodu. To zopakujeme přibližně milionkrát, najdeme sousední body, spojíme je do jedné sítě a máme k dispozici model povrchu.
Poté přichází na řadu barevná kamera a termovizní kamera. Pomocí každé z nich sejmeme několik překrývajících se snímků, opět se znalostí odkud se kamera dívá a jakým směrem. Zpětnou projekcí paprsku pak určím, který bod v obraze z kamery připadá na který bod 3D modelu. Výsledkem je vícevrstvý model snímaného objektu.
